机器人信息发布
代码 /root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_bringup/yahboomcar_bringup/Mcnamu_driver_X3.py
#create subcriber
self.sub_cmd_vel = self.create_subscription(Twist,"cmd_vel",self.cmd_vel_callback,1)
self.sub_RGBLight = self.create_subscription(Int32,"RGBLight",self.RGBLightcallback,100)
self.sub_BUzzer = self.create_subscription(Bool,"Buzzer",self.Buzzercallback,100)
#create publisher
self.EdiPublisher = self.create_publisher(Float32,"edition",100)
self.volPublisher = self.create_publisher(Float32,"voltage",100)
self.staPublisher = self.create_publisher(JointState,"joint_states",100)
self.velPublisher = self.create_publisher(Twist,"vel_raw",50)
self.imuPublisher = self.create_publisher(Imu,"/imu/data_raw",100)
self.magPublisher = self.create_publisher(MagneticField,"/imu/mag",100)
#create timer
self.timer = self.create_timer(0.1, self.pub_data)ros2 run yahboomcar_bringup Mcnamu_driver_X3-
ros2 topic list话题名字 话题内容 /Buzzer 蜂鸣器 /RGBLight 灯带效果控制 /cmd_vel 速度控制 /edition 版本信息 /imu/data_raw IMU传感器数据 /imu/mag IMU-磁力计数据 /vel_raw 小车速度信息 /voltage 电池电压信息 ros2 topic echo /voltage读取电压数据- 运动
ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.2}}", 停止ros2 topic pub /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}"
机器人控制
代码在 /root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_ctrl/yahboomcar_ctrl/yahboo m_keyboard.py
def getKey(self):
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist: key = sys.stdin.read(1)
else: key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, self.settings)
return keyros2 run yahboomcar_bringup Mcnamu_driver_X3ros2 run yahboomcar_ctrl yahboom_keyboard键盘控制程序
节点通信图 ros2 run rqt_graph rqt_graph :

机器人状态估计
代码 /root/yahboomcar_ros2_ws/yahboomcar_ws/src/yahboomcar_bringup/launch/yahboomcar_bringup_X3_launch.py 和 /root/yahboomcar_ros2_ws/software/library_ws/src/robot_localization/launch/ekf.launch.py
ros2 launch yahboomcar_bringup yahboomcar_bringup_X3_launch.pyros2 run rqt_graph rqt_graph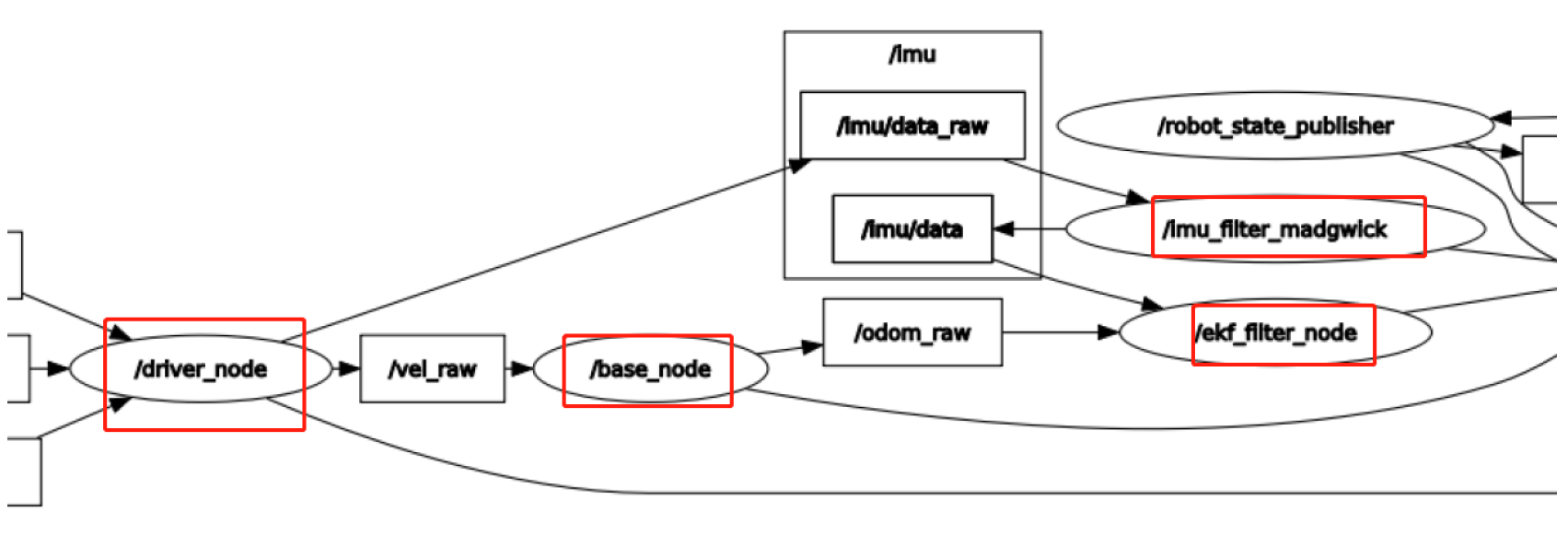
ros2 node info /ekf_filter_node查看节点信息
driver_node = Node(
package='yahboomcar_bringup',
executable='Mcnamu_driver_X3',
)
base_node = Node(
package='yahboomcar_base_node',
executable='base_node_X3',
# 当使用ekf融合时,该tf有ekf发布
parameters=[{'pub_odom_tf': LaunchConfiguration('pub_odom_tf')}]
)
imu_filter_node = Node(
package='imu_filter_madgwick',
executable='imu_filter_madgwick_node',
parameters=[imu_filter_config]
)
ekf_node = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('robot_localization'), 'launch'),
'/ekf_x1_x3_launch.py'])
)- driver_node:启动小车底盘,获取到轮子的速度vel数据,发布给/base_node节点,获取imu数据,发布给/Imu_filter_madgwick节点;
- base_node:接收vel数据,通过计算,转换成odom_raw数据,发布给/ekf_filter_node节点;
- Imu_filter_madgwick:接收底盘发布的imu数据,通过自身算法过滤后,发布过滤后的imu/data 数据给/ekf_filter_node节点;
- ekf_filter_node:接收/base_node节点发布的odom数据和/Imu_filter_madgwick发布过来的 imu/data数据,通过自身算法,融合后,发布odom数据。
# Depending on gui parameter, either launch joint_state_publisher or joint_state_publisher_gui
joint_state_publisher_node = Node(
package='joint_state_publisher',
executable='joint_state_publisher',
condition=UnlessCondition(LaunchConfiguration('gui'))
)
joint_state_publisher_gui_node = Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
condition=IfCondition(LaunchConfiguration('gui'))
)