坐标与位姿进阶
- 构型空间,最小的参数设置,作为广义坐标描述系统中所有元件的位置
- 火车只能沿着铁轨运动,用一个广义坐标描述即可。 两关节的机械手用两个广义坐标描述。 N个独立的广义坐标 <==> 系统有N个自由度。
- 任务空间,是我们想要描述任务的一个空间,维度是高于构型空间的。 比如说,我们可以用二维平面来描述火车的位置,虽然火车只能沿着一维进行运动。
参考
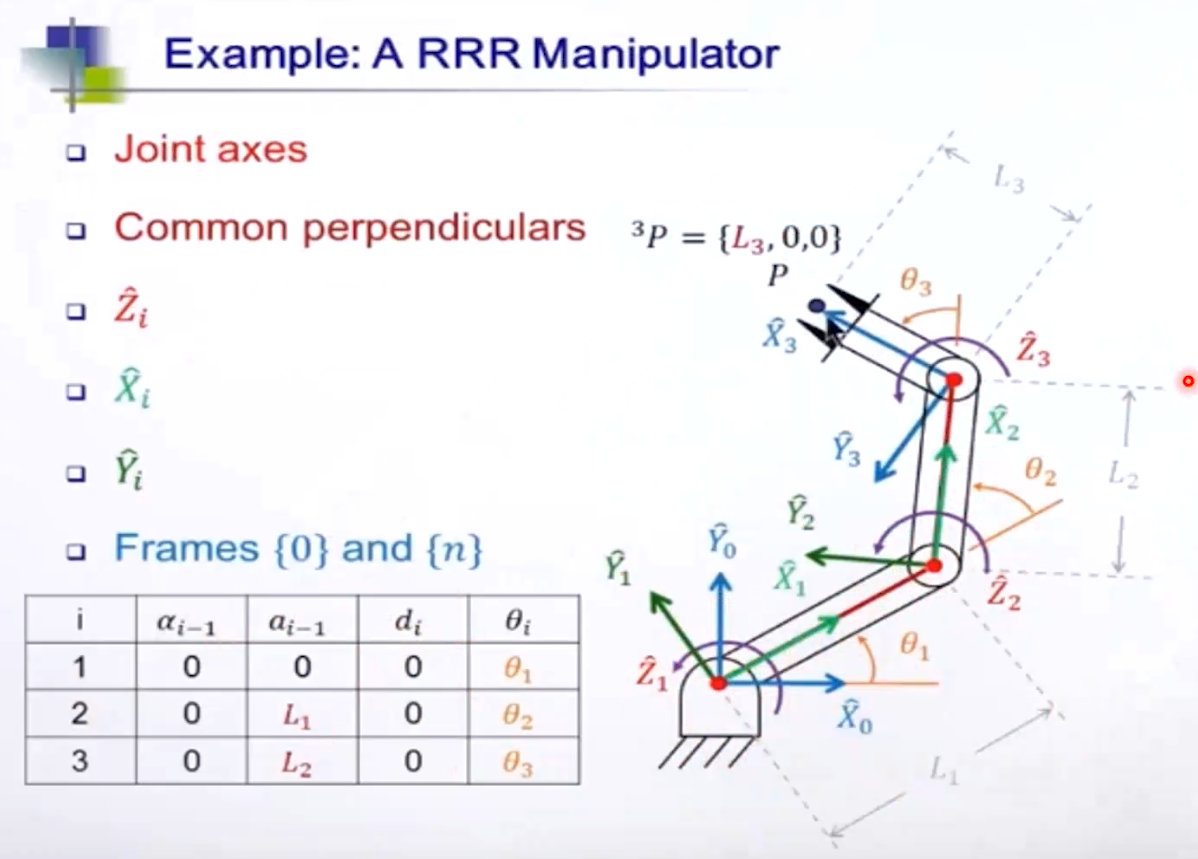
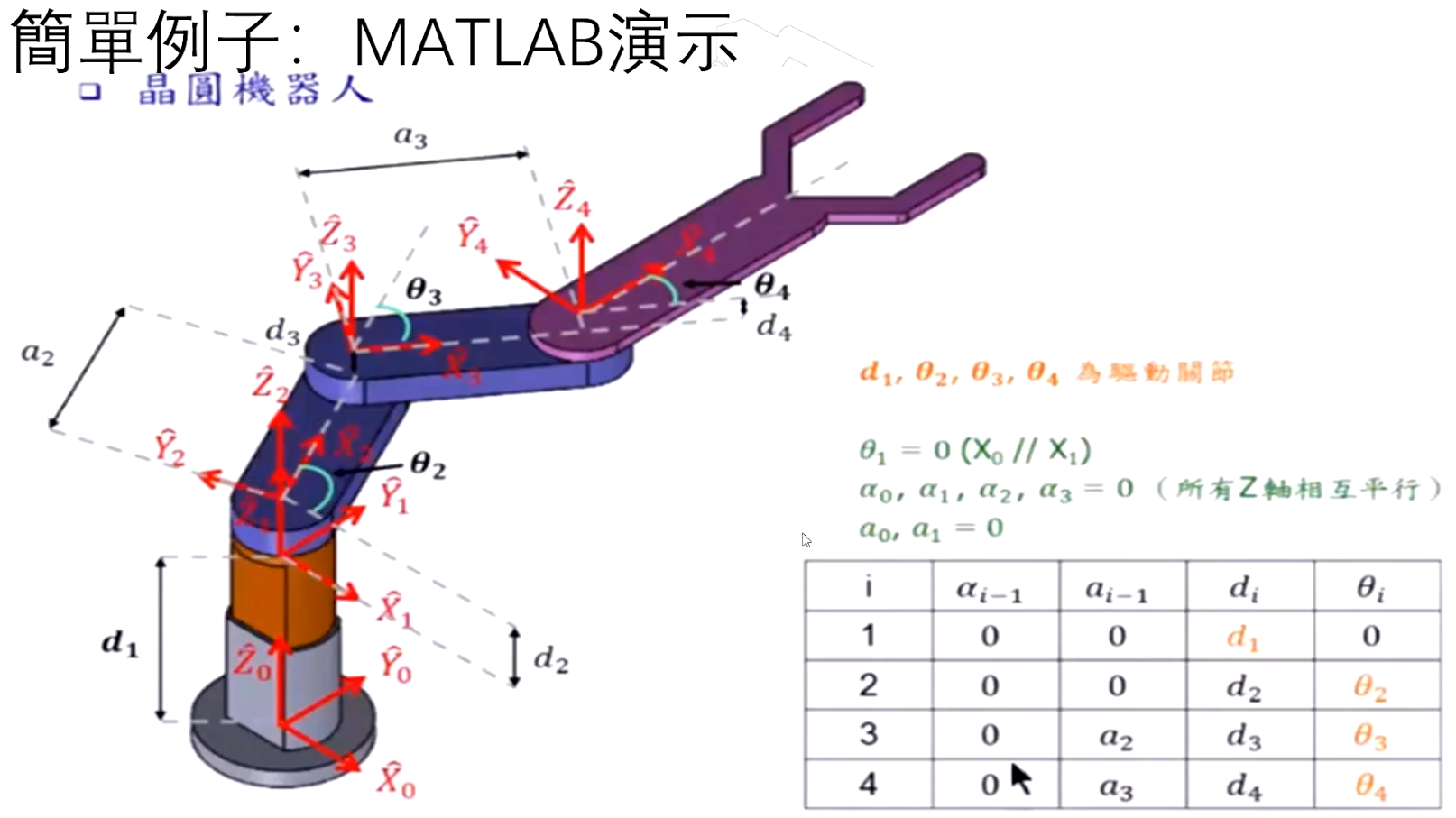
正运动学
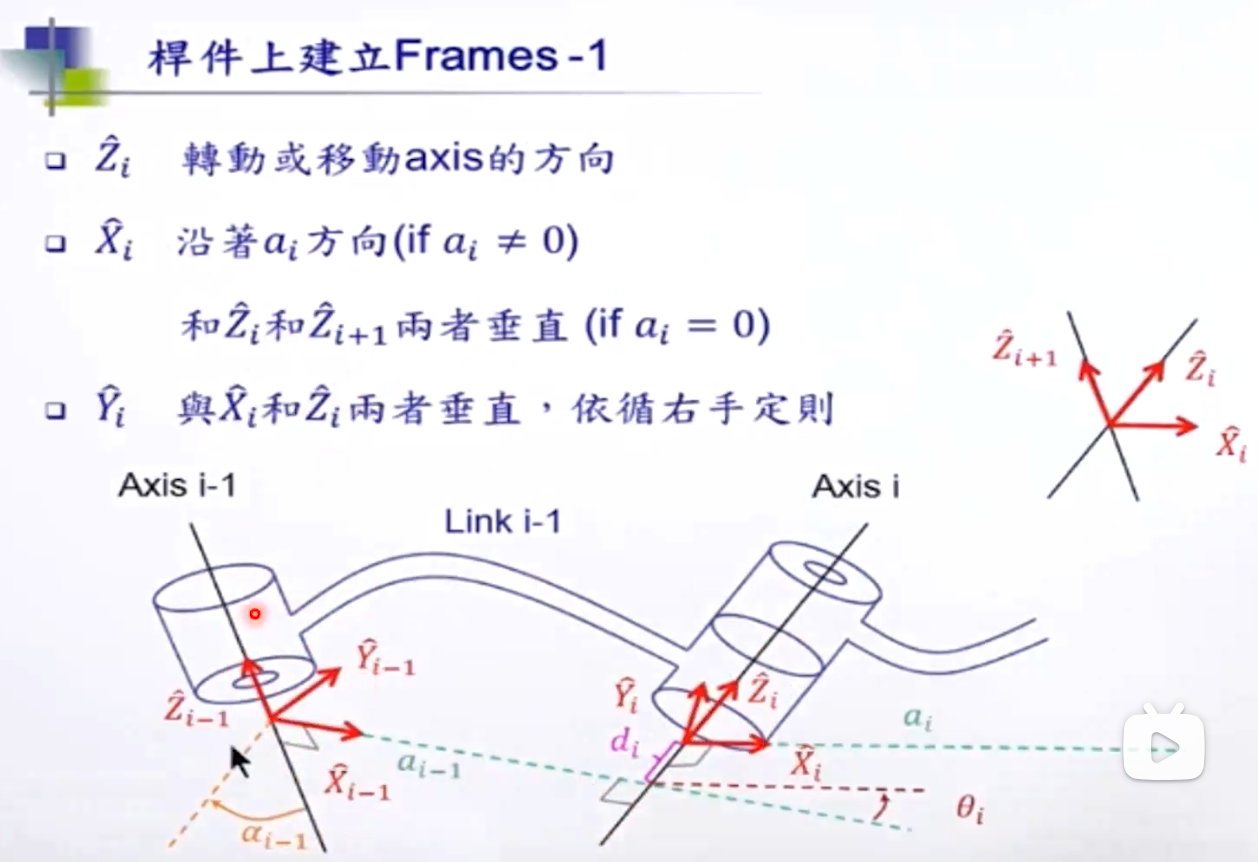
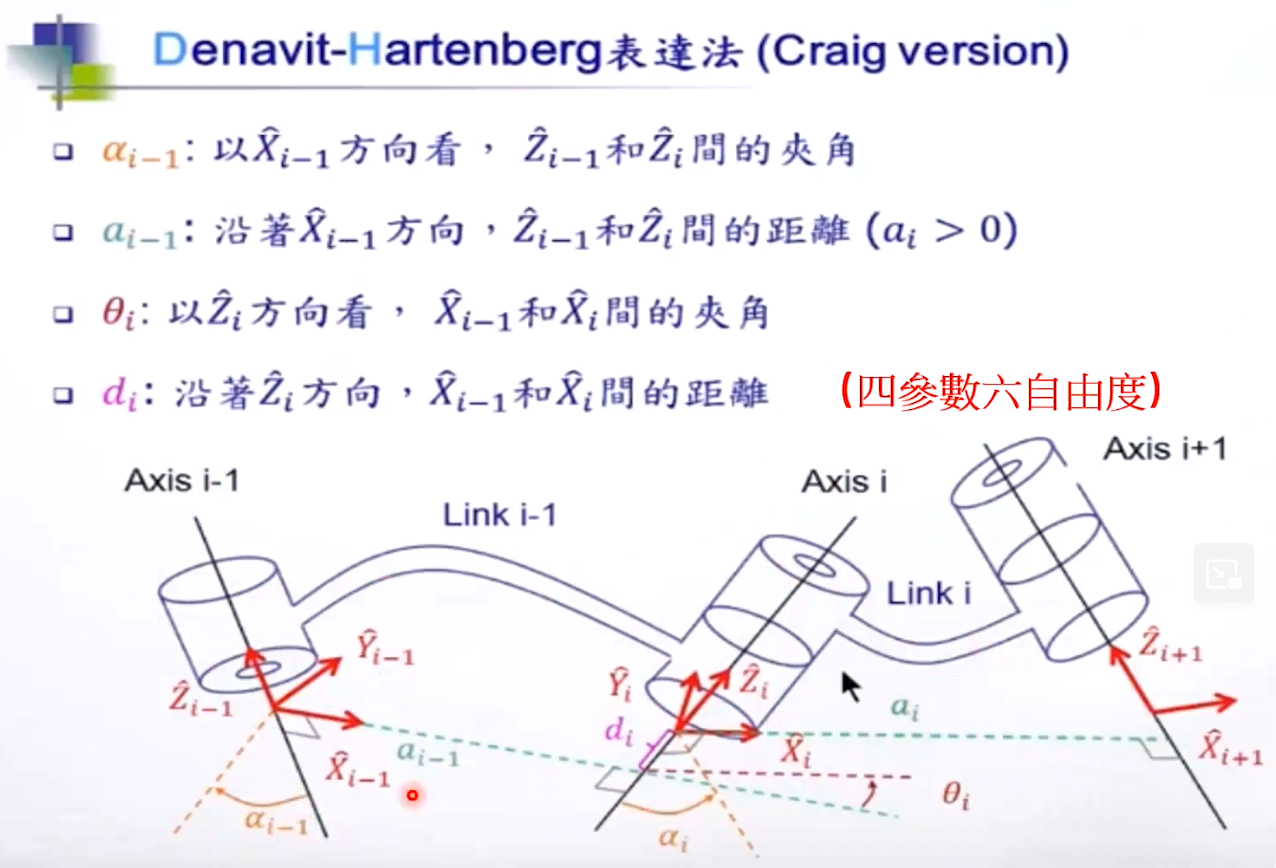
D-H
- Revolute joint (αi, ai, di, θi), 旋转,θi就是旋转角度
- Prismatic joint (αi, ai, di, θi), 平移,di就是平移的参数。
建系
参考
逆运动学
- 工作空间: 运动学方程的解只能在工作空间中找到
- 灵巧工作空间:末端能够从各个方向到达的区域
- 可达工作空间:末端至少能从一个方向到达的区域
可解性
- 最优解需要确定标准,比如最短行程,最低功率等等
- 连杆非零参数越多,达到特定目标的方式就越多,解也越多。
- 封闭解法(解析解):严格公式推导
- 数值解法:简化方程,数值插值等计算离散化,没有那么准确。
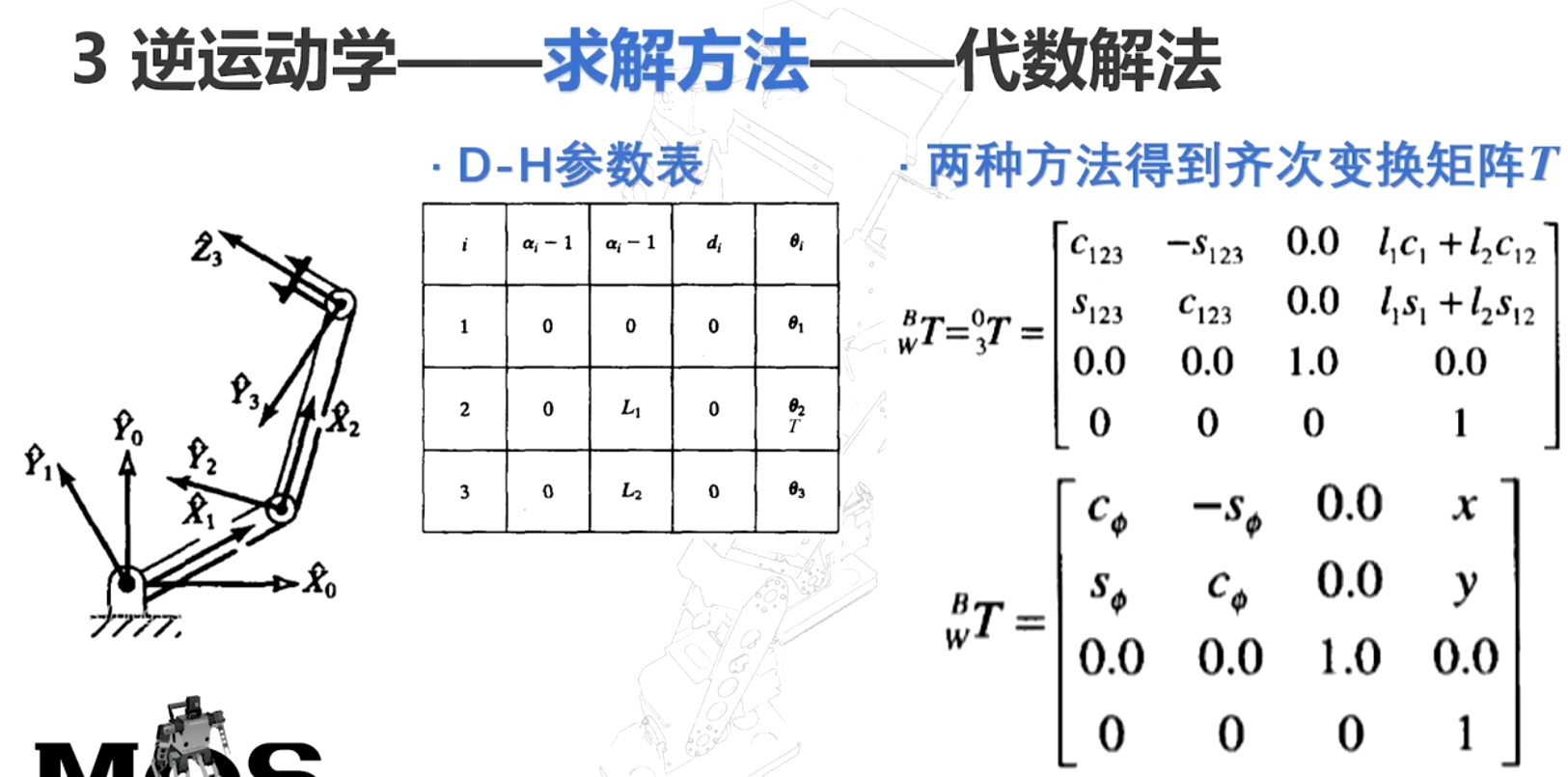
- 代数解法:
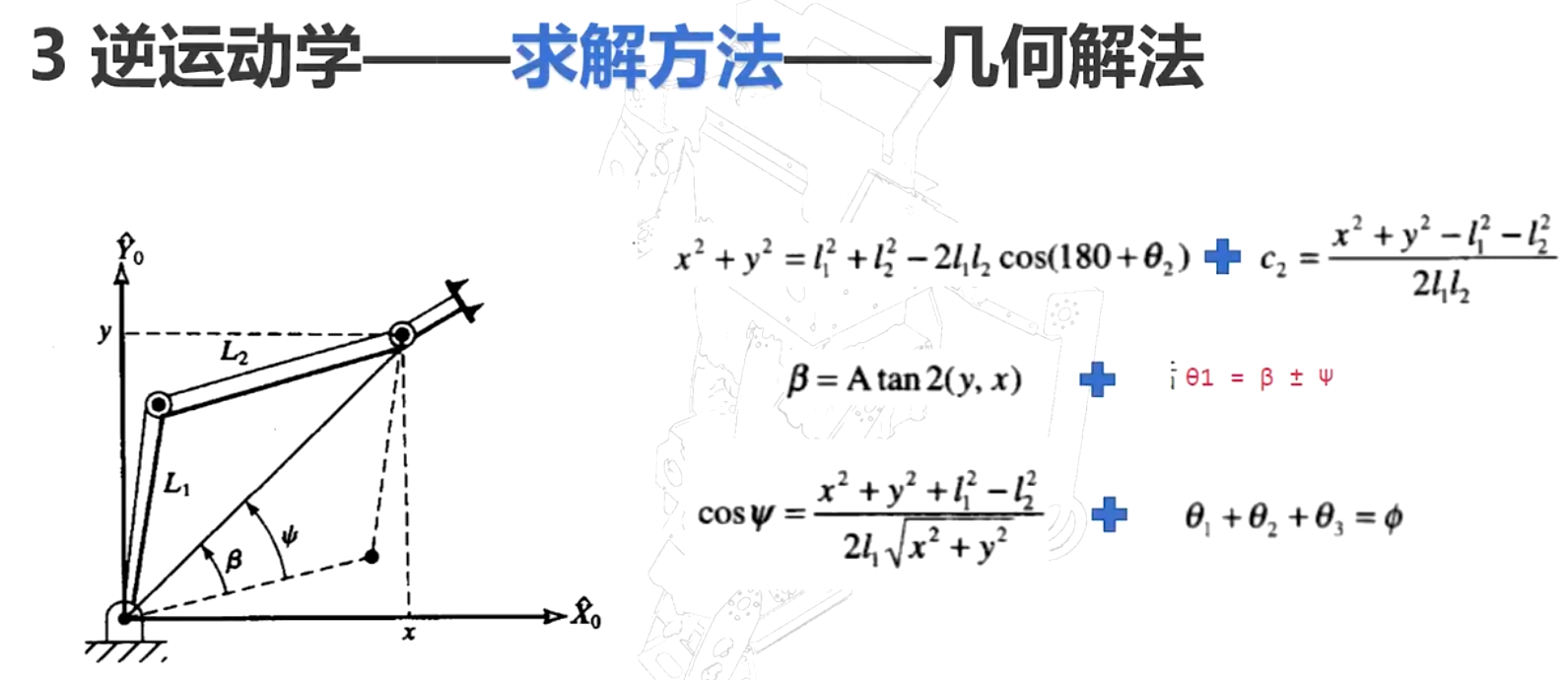
- 几何解法
六自由度
所有包含转动和移动的串联六自由度均是可解的,但是一般是数值解。只有特殊情况,才有解析解。
参考
轨迹规划
joint space
- 先由逆运动学求出关节状态,
- 再对关节状态规划 smooth,
- 再根据正运动学转换到末端验证可行性。
cartesian space
- 直接对末端规划 smooth,
- 根据逆运动学,求出关节状态
- 检查关节状态可行性
优点:规划的轨迹更加有物理意义。 缺点:计算量大,逆运动学复杂。
可操作度
因为单纯的解只是数学上的,实际上很多时候在某些位置会处于奇异位形,失去自由度,为了衡量与奇异位形之间的距离,引入了可操作度。
